"World-class center of excellence in AI Research and Innovation to improve the lives of people."
Research | Educate | Innovate





High-quality research from LMICs on critical global problems and democratizing AI. Building a solid research and higher education foundation in AI, informatics, and applied math in Nepal.
NAAMII is a company not-distributing profit created by Nepali researchers with the mission of building a firm foundation of scientific research in Nepal in the field of informatics, applied maths, and AI and contributing toward democratizing and decentralizing AI in the world. Doing science and technology research in low-income countries such as Nepal is challenging- there is a lack of adequate funding, experts in diverse fields, and policy and infrastructure. We are therefore taking a very comprehensive approach to solving this complex web of systemic problems.
Featured Research Projects

Genomic Epidemiology of SARS-CoV-2 in Nepal
The coronavirus disease 2019 (COVID-19), caused by the Severe Acute Respiratory Syndrome Coronavirus 2
Read More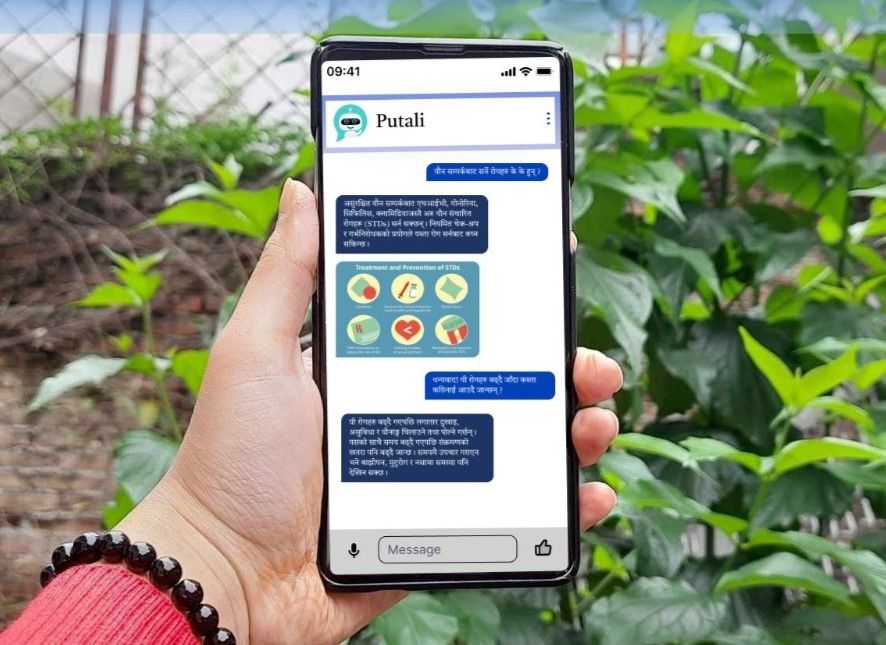
Evaluating Nepali Sexual, Reproductive, and Maternal Health (SRMH) Chat-bot with Large Language Models (LLMs)
Most people in Nepal don’t have easy access to clear information about Sexual, Reproductive, and Maternal
Read More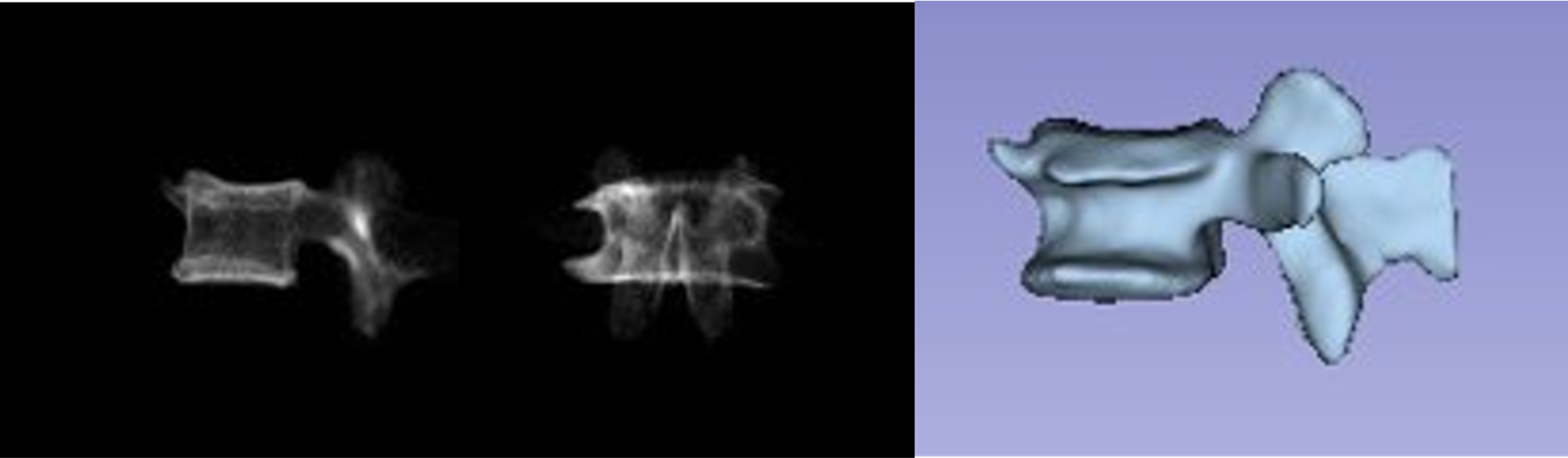
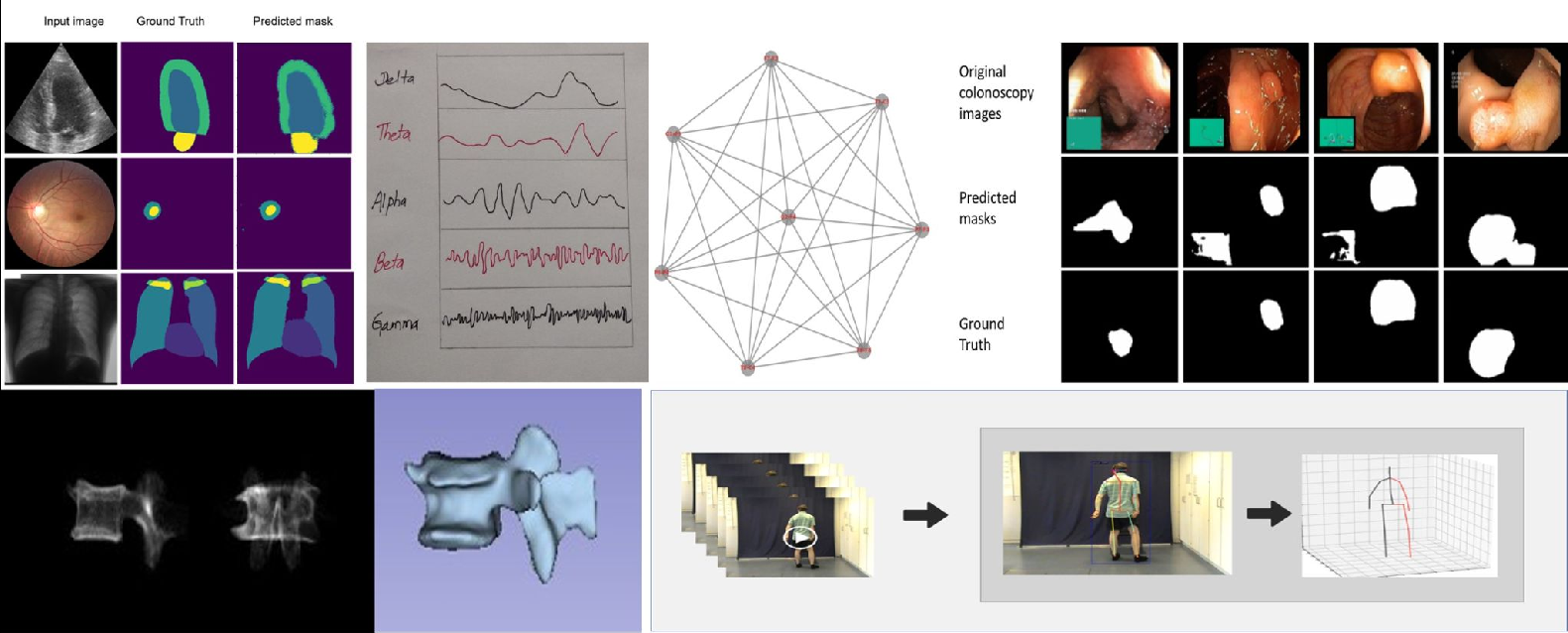
3D Reconstruction from Biplanar X-ray
CT scans are often taken to visualize internal body organs, diagnose pathologies and for surgical planning.
Read More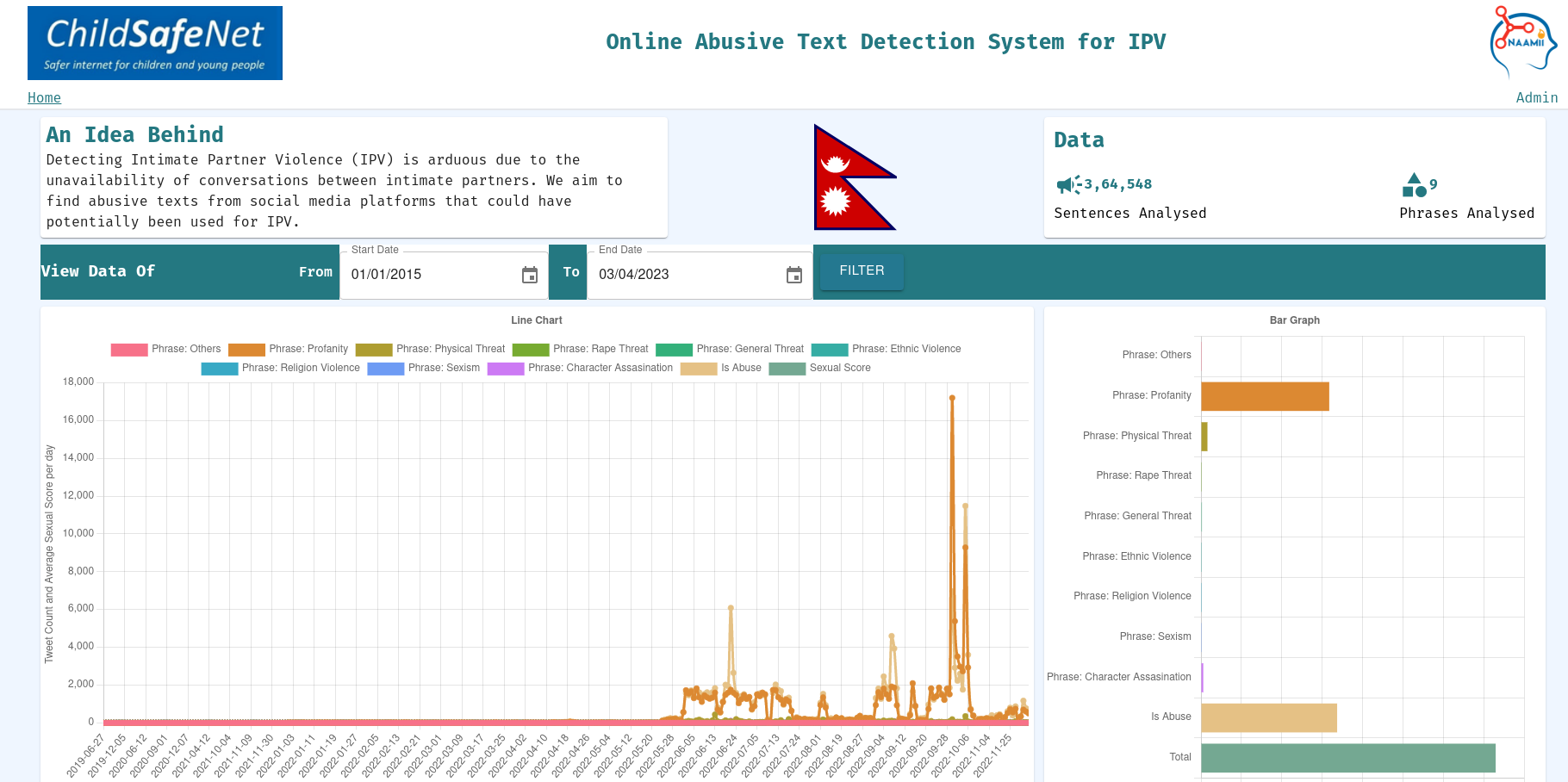
Abusive Nepali Text Detection
This project focuses on aiding IPV research to understand the nature and prevalence of online IPV and to
Read More
AI-assisted VIA Screening of Cervical Cancer
This project aims to research and develop AI-assisted VIA screening using mobile-captured photos to
Read More
AI Assisted Microscopy
This project aims to develop object detection models to detect diarrhea cysts from vegetables, stool, and water
Read More
AI Ethics Survey in Nepal
The main goal of this project is to do a landscape mapping of understanding and approaches to AI Ethics in Nepal
Read More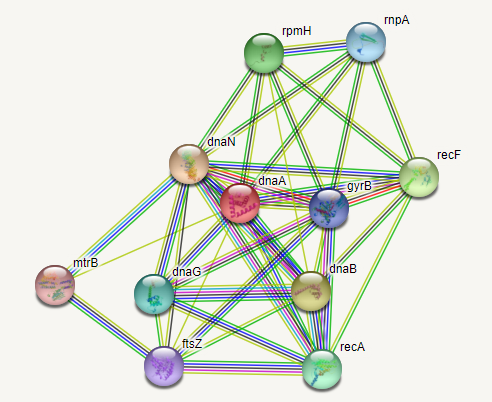
Systems Genomics Modeling of Multi-drug Resistance in Mycobacterium tuberculosis
Multi-drug resistance presents a growing challenge to global tuberculosis (TB) control efforts, with a
Read More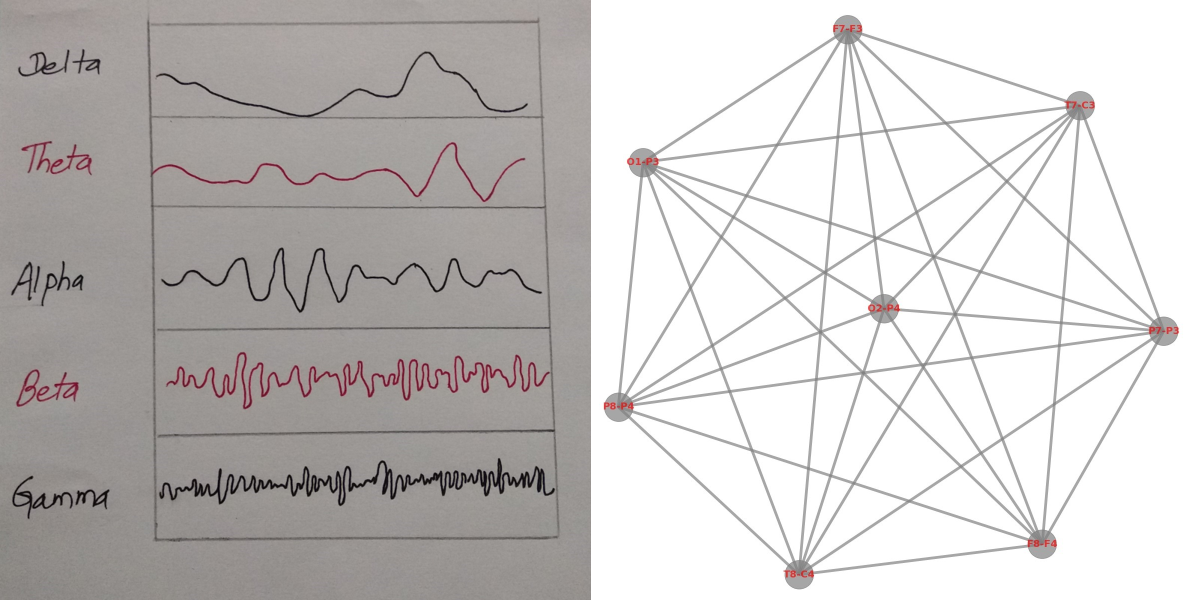
Geometric deep learning on graphs for electroencephalogram dataset
The objective of the study is to design a geometric deep learning approach to identify whether a person is
Read More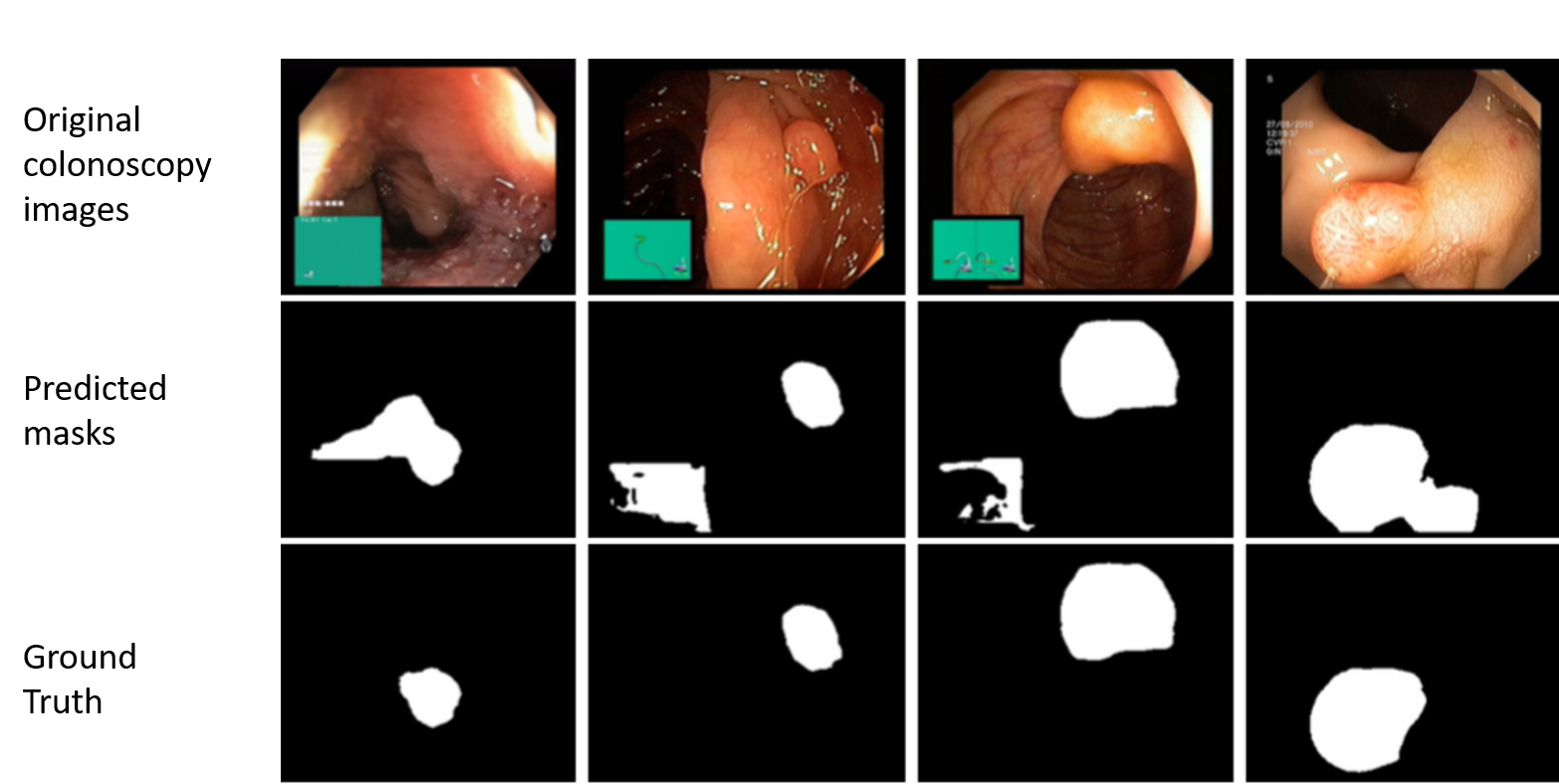
GI tract anomaly detection from endoscopy images
The aim of this research is to build comprehensive techniques for detection, localization and
Read More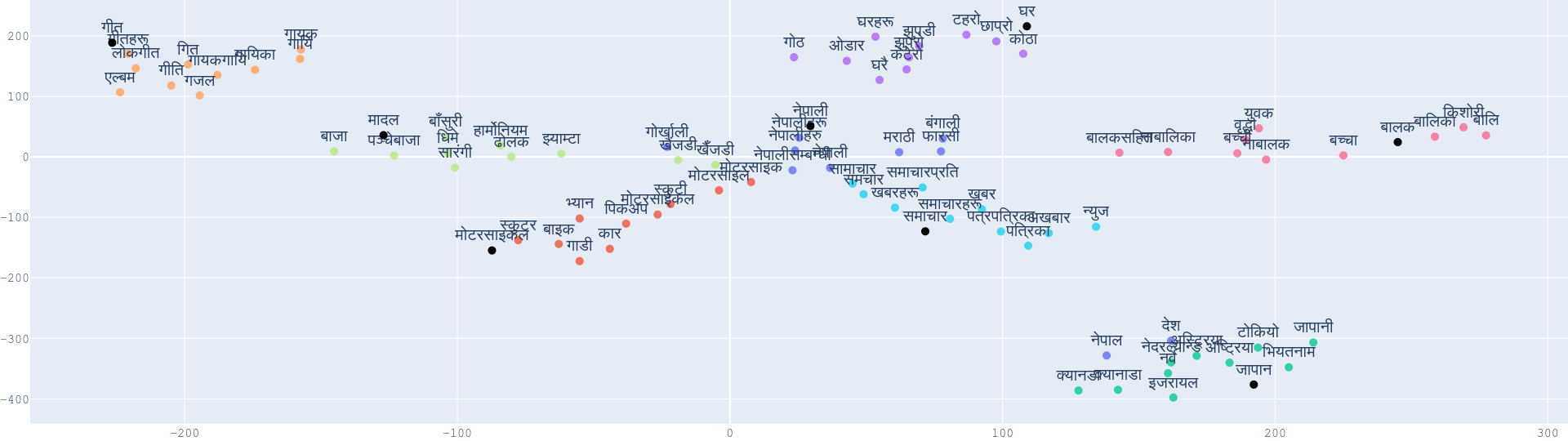
State-of-the-art in Nepali NLP
We will first do a comprehensive review of the current state-of-the art of NLP tools and techniques
Read More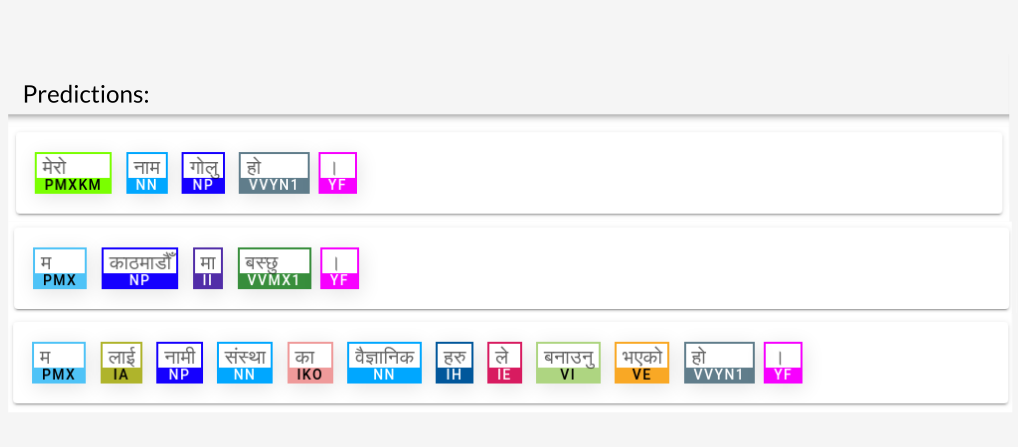
Nepali Dialogue Corpus
This research aims to study the existing Nepali dialogue corpus (if any), identify their limitations, and
Read More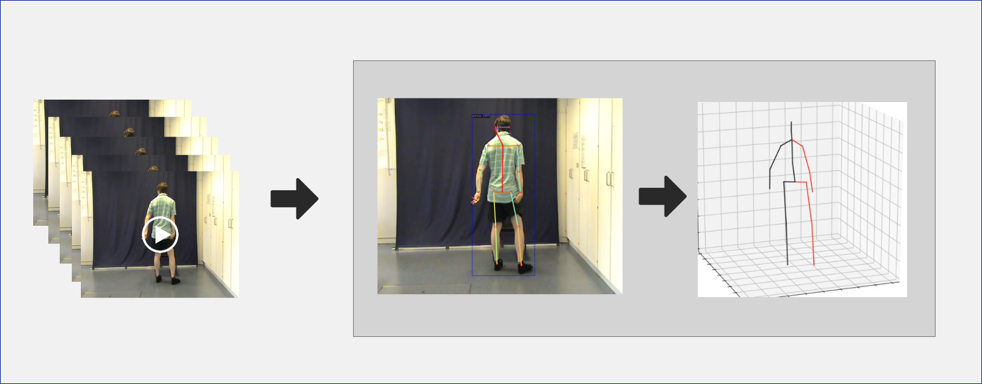
Motion Analysis for Clinical Classification of Dystonia Patients using deep Learning-based Approach
We aim to design and implement a deep learning-based algorithm to classify different dystonia types and
Read More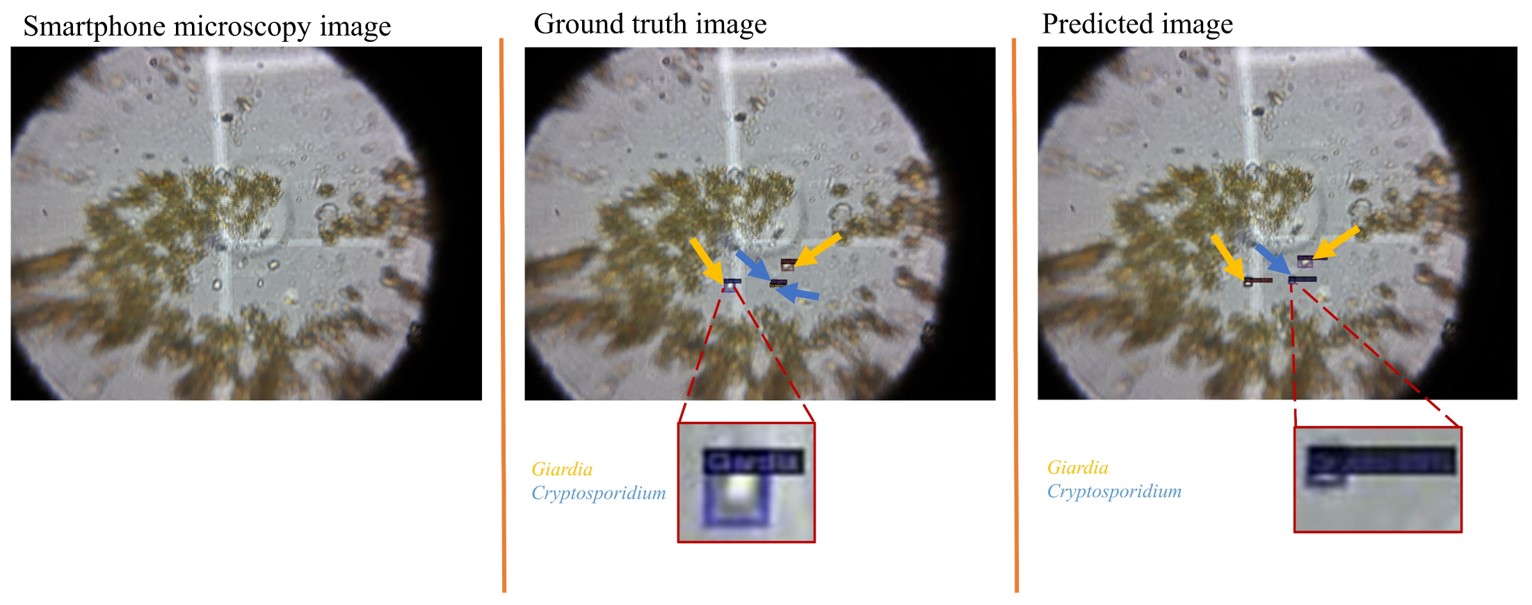
AI-Assisted Smartphone Microscopy
Water-borne diseases due to parasites such as Giardia and Cryptosporidium are still an important problem in
Read More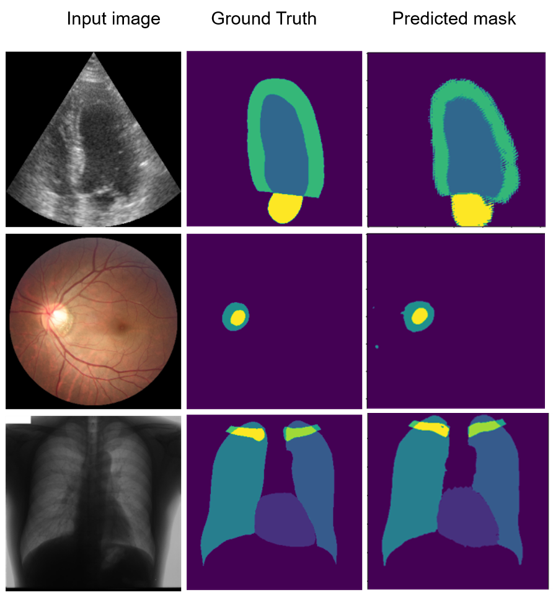
Semi-Supervised Semantic Image Segmentation
Supervised deep learning methods have seen tremendous progress with several successful applications since
Read More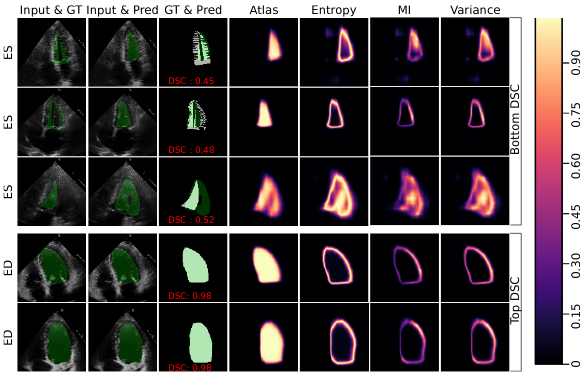
Uncertainty Estimation in Semantic Segmentation of US Images
2D US is the most common imaging modality for cardiovascular diseases and fetal scans. The portability and
Read More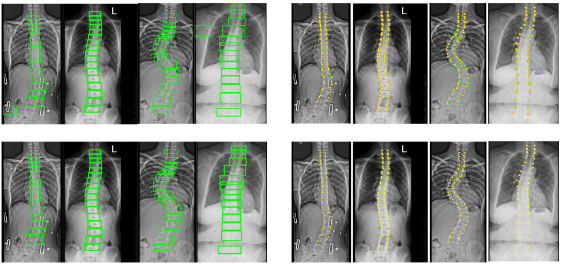
Automatic Spine Curvature Estimation from X-ray Images
Idiopathic scoliosis is one of the most common spinal deformities that can be potentially lethal if not intervened
Read More
Augmented Reality System for Overlaying Objects in Room
“My room” is an exclusive feature in Explorug, a product of Alternative Technology, that can overlay 3D
Read More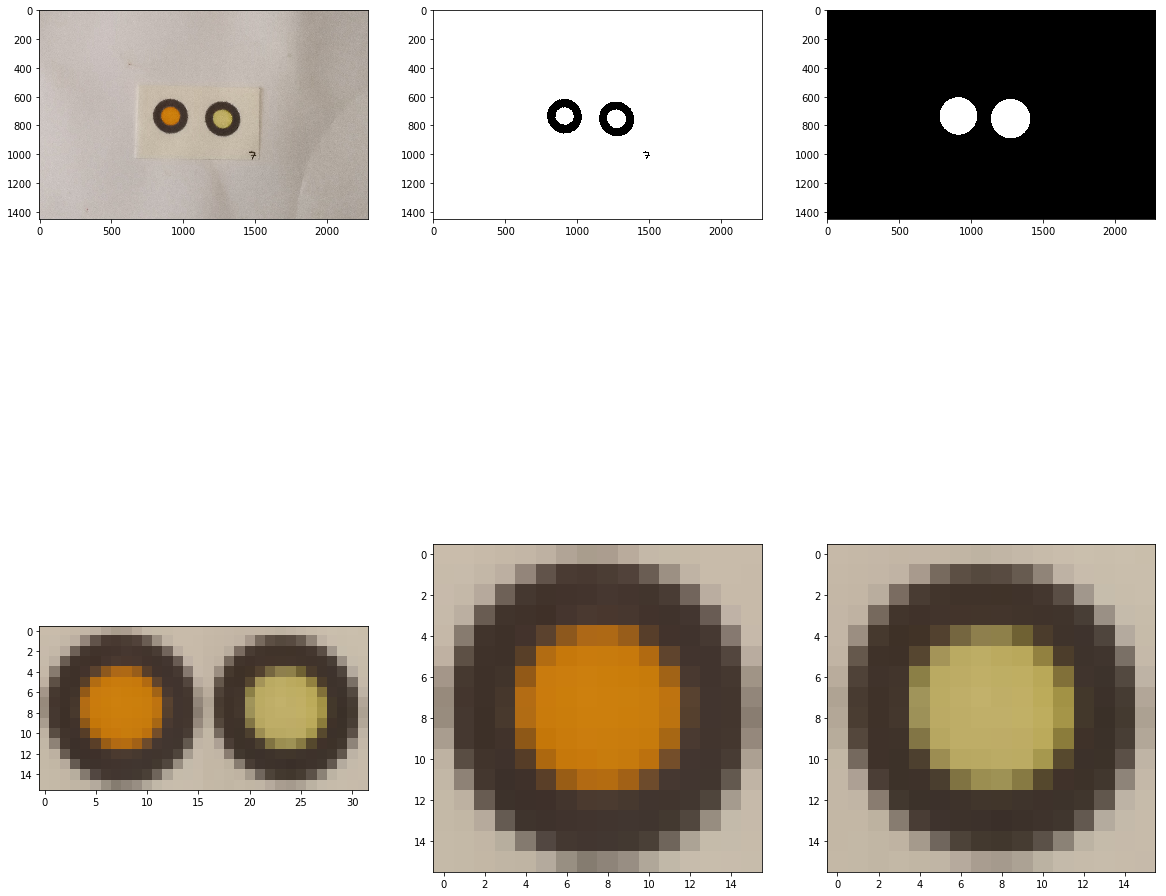
Estimating Pesticide Concentration with Smartphone
This is a multi-disciplinary research with an aim to empower everyone to be able to measure pesticide
Read More
HIPPIE- Autonomous Robots Using Machine Learning and Swarm Intelligence
Artificial Intelligence, Machine Learning and Deep Learning has been around for a while. Everyone is
Read MoreResearch Groups
Transforming Global health with AI (TOGAI)
Transforming Global health with AI (TOGAI) aims to identify and solve difficult but important problems
See Projects
B Bhattarai MultiModal Learning Lab (MMLL)
B Bhattarai MultiModal Learning Lab (MMLL) is a research group within NAAMII that focuses on theoretical
See Projects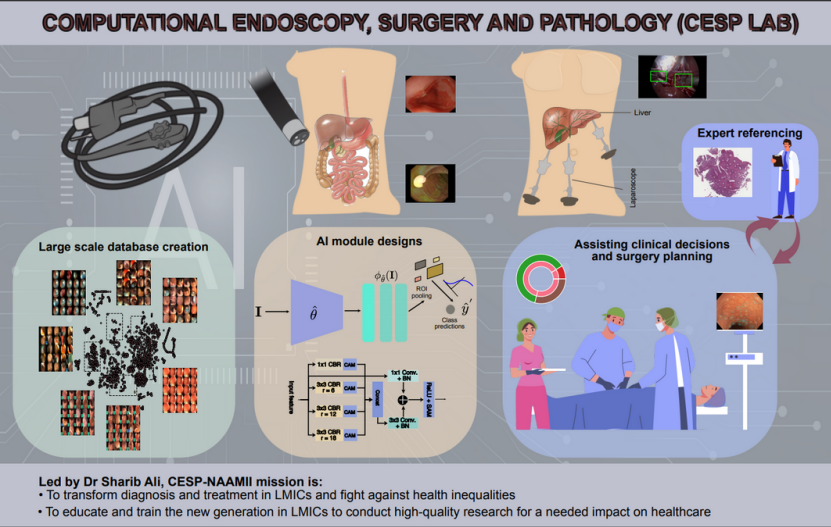
Computational Endoscopy, Surgery & Pathology (CESP)
Computational Endoscopy, Surgery & Pathology Group (CESP) is another autonomous research group within
See projects
Computational Genomics Lab (CGL)
The Computational Genomics Lab (CGL) aims to solve complex problems in biological sciences using
See Projects
Providential use of spatial and human visual computing (PUSHVIC)
The Providential Use of Spatial and Human Visual Computing (PUSHVIC) Lab is a pioneering research laboratory
See Projects
Research using Artificial Intelligence in Neuroscience (RAIN)
Research using Artificial Intelligence in Neuroscience (RAIN) is another autonomous research group within
See Projects
AI & Society
As the applications of AI are increasing rapidly across all sections of society, we need to actively work to better
See Projects
Other Adj. Faculties
There are other adjunct faculties working in different projects other than the groups.
See ProjectsEducation & Outreach Section

Annual Nepal AI School (ANAIS)
NAAMII annually organizes Nepal AI school and has successfully conducted three winter editions. The
Read More
Training Workshops
NAAMII conducted a 3-month summer research Training program from June-August 2020. 40 highly
Read More
Public Lecture Series
NAAMII has been organizing different lecture series in collaboration with
Read MoreIndustry & Innovation

Incubating & Supporting Start-ups
NAAMII is incubating Diyo.AI, providing scientific support for developing the next generation of
Read More
Industry Training & Capacity Building
NAAMII Research Scientist has trained, mentored, and helped build a machine learning team at different
Read More
Research & Development for Industry
Our team, led by a Research Scientist, does research and development work for different organization in
Read More